
The most complex and long-running personal project I’ve started. Six-legged hexapod robot that I’ve been slowly building and improving over time. This is where I’m really pushing myself - combining everything I’ve learned about mechanical design, control systems, and robotics into one ambitious project.
What’s Done So Far
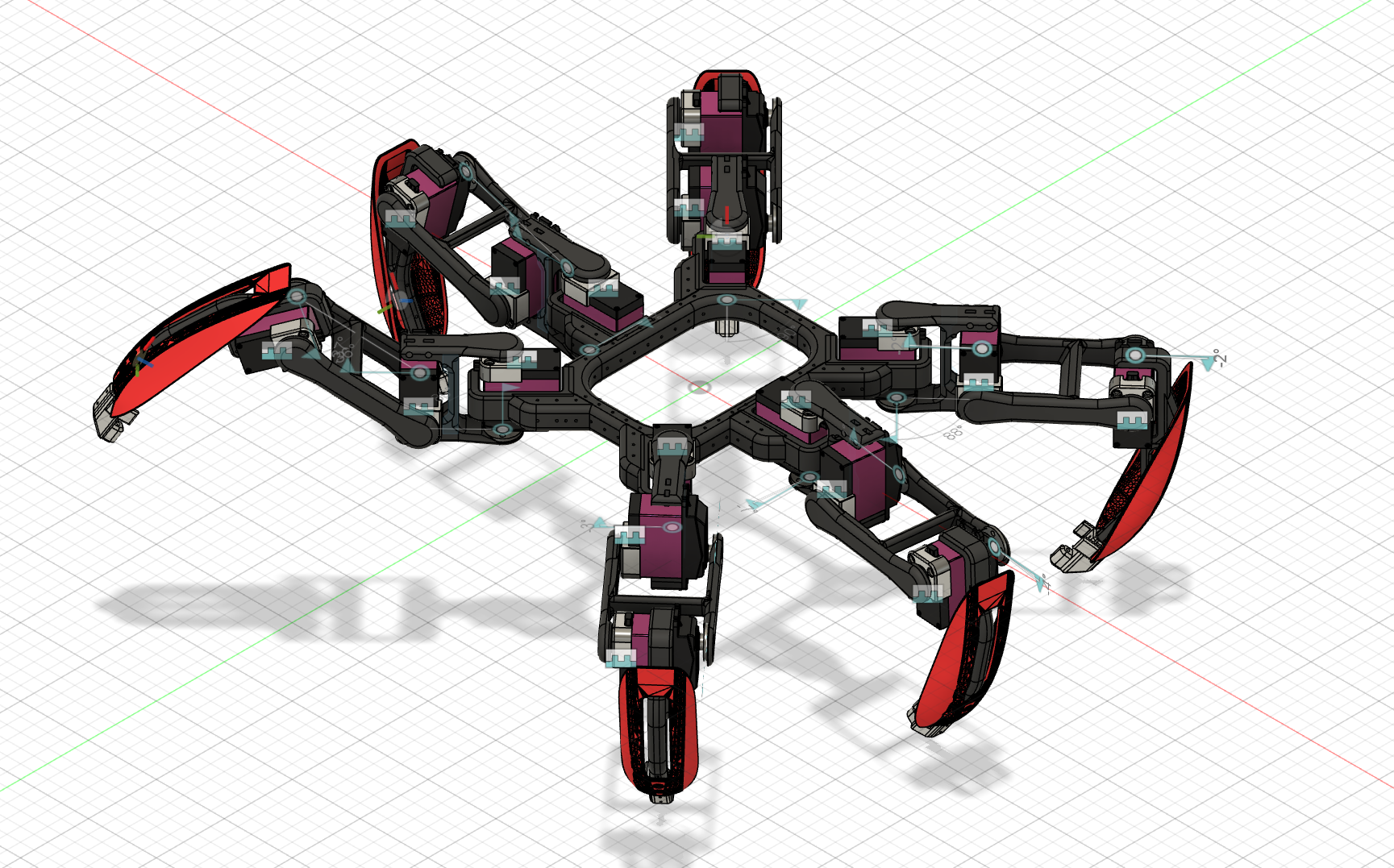
Mechanical Design ✅
Complete CAD model in Fusion 360. Spent a lot of time getting the leg geometry right for stable walking gaits.
Simulation & Mechanics ✅
Simulated the kinematics to verify the design works before building the physical version.
Inverse Kinematics ✅
Developed and implemented IK algorithms for precise leg movement control. Each leg needs to coordinate with the others for stable walking.
What I’m Working On Now
Custom PCB with Pi CM5
Thinking about designing a custom PCB using a Raspberry Pi Compute Module 5 instead of a bulky Pi 5. Would make the whole system way more compact and integrated.
NVIDIA AI Platform Integration
Looking into NVIDIA’s AI learning platform to teach the hexapod how to walk and adapt to terrain. Want to see if I can get it to learn gaits on its own instead of hard-coding everything.
Multi-Camera Odometry & SLAM
Planning to add multiple cameras for visual odometry and SLAM (simultaneous localization and mapping). Goal is to make it map its surroundings and react to obstacles like a real creature would.
The Vision
Building this to be more than just a walking robot - want it to autonomously navigate, learn from its environment, and adapt its movement. Basically trying to create something that feels alive.
More to come as I make progress on the AI and sensor integration.