


Work I did during my third work term at the Intelligent Systems Lab under Dr. Oscar De Silva. This was exactly the kind of technical robotics work I’m passionate about - got to work across mechanical, electrical, and software domains on a real R&D project.
The payload integrates LiDAR, thermal, IR, and optical cameras for autonomous aerial and marine platforms used in search and rescue and environmental monitoring.
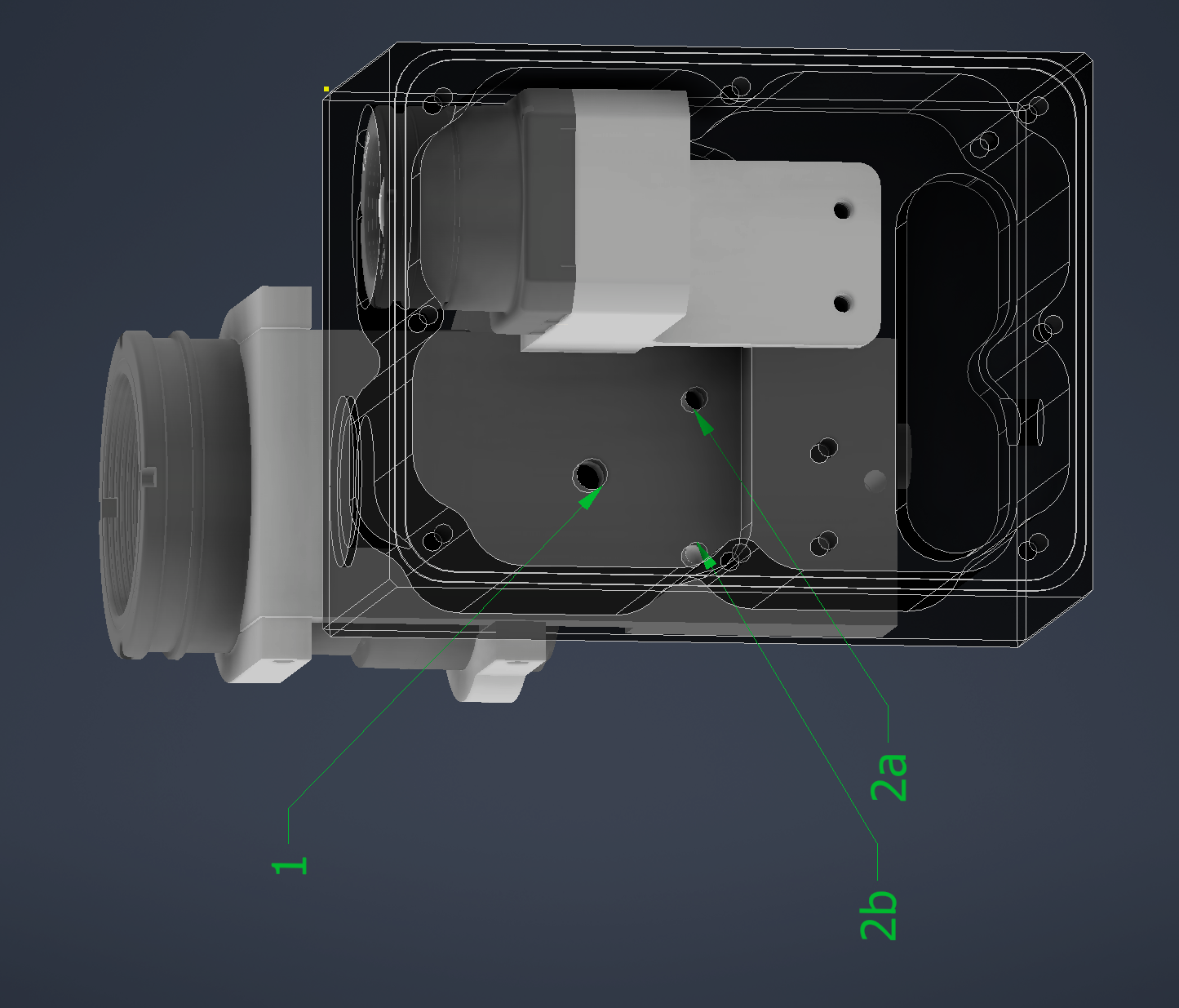
Mechanical Work
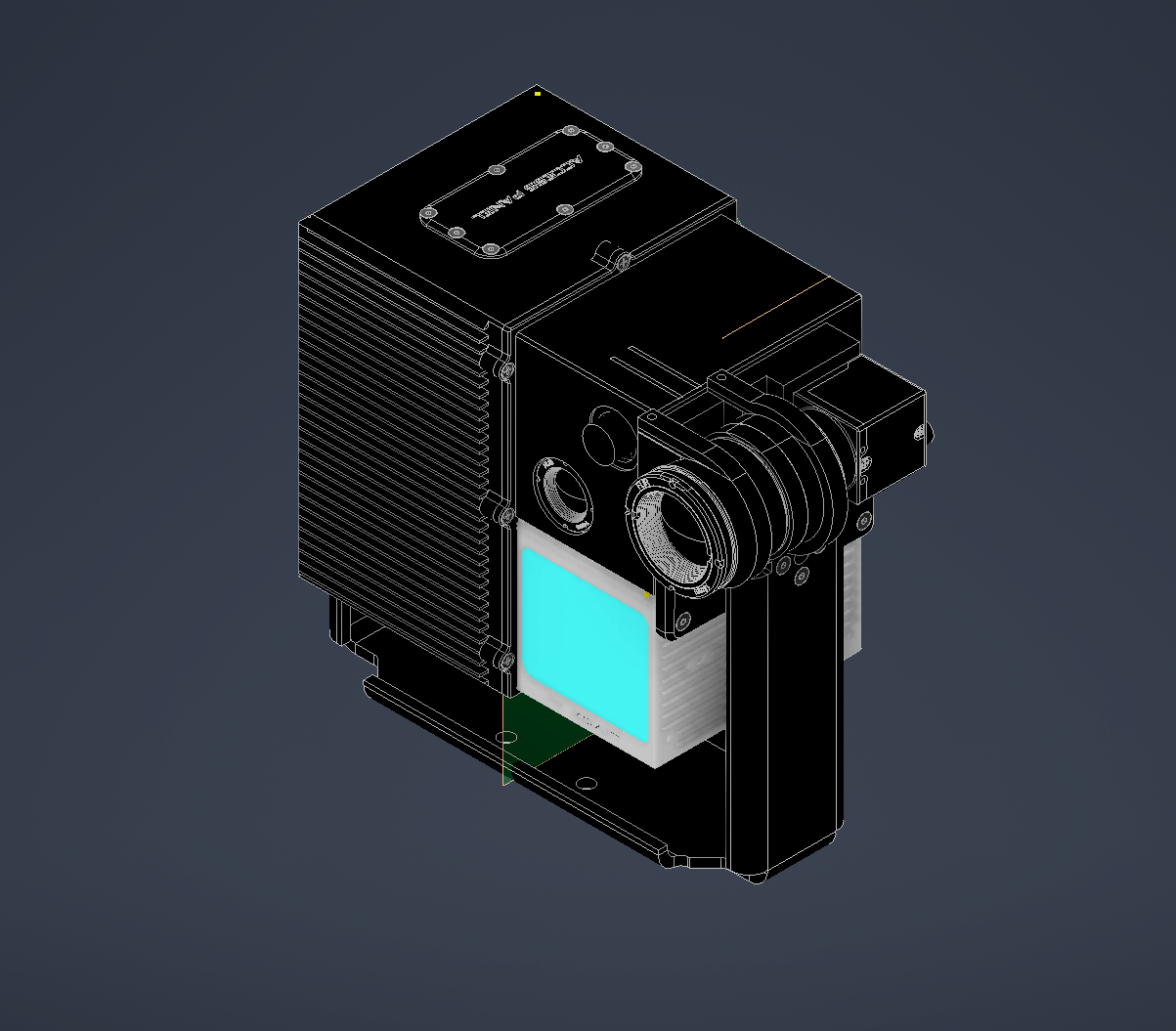
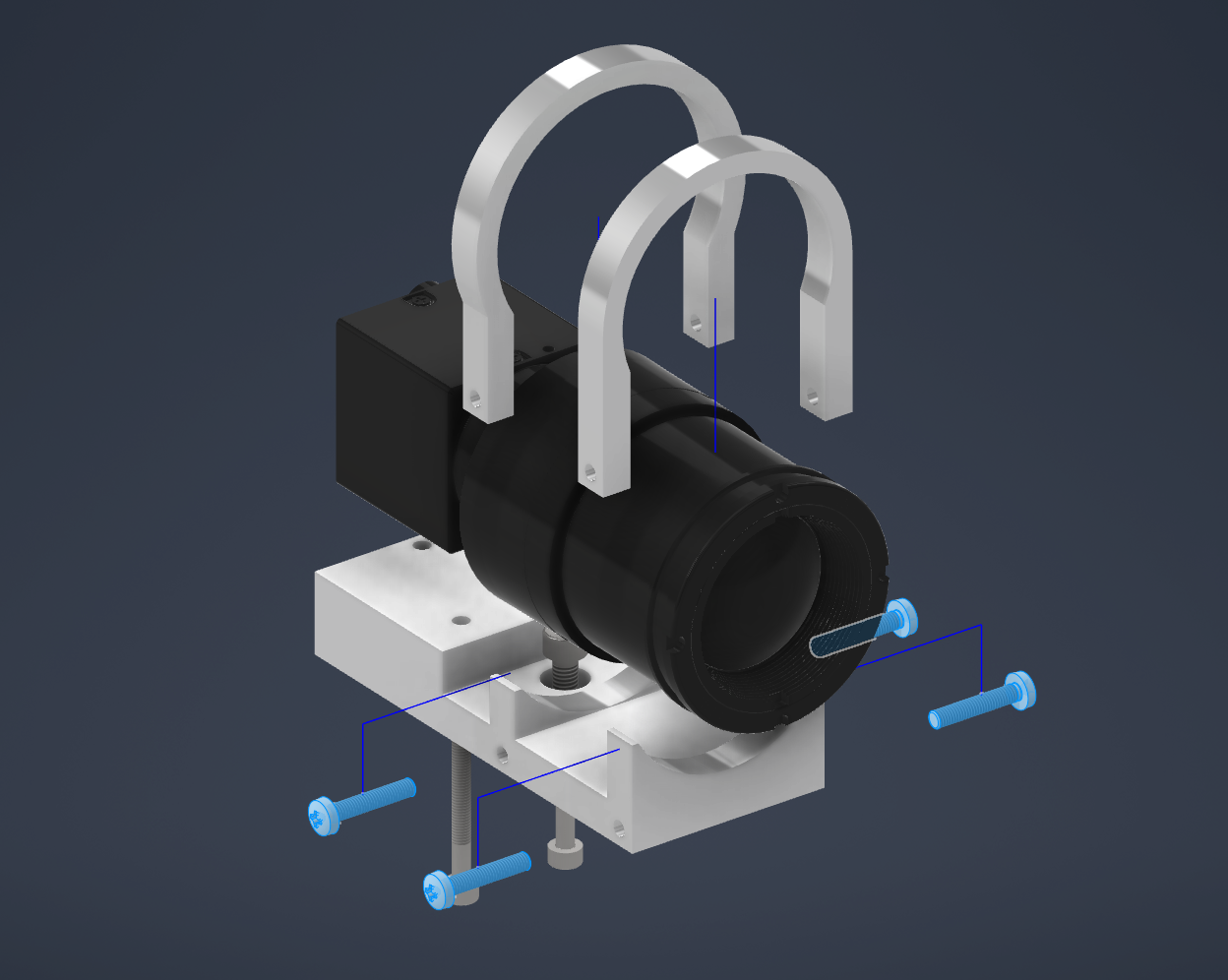
- Modified existing Inventor CAD models to support new sensors and camera modules.
- Designed and tested internal housing modifications, ensuring proper fit, heat dissipation, and wiring channels.
- Performed FEM analysis and rapid prototyping before finalizing designs for CNC and additive manufacturing.
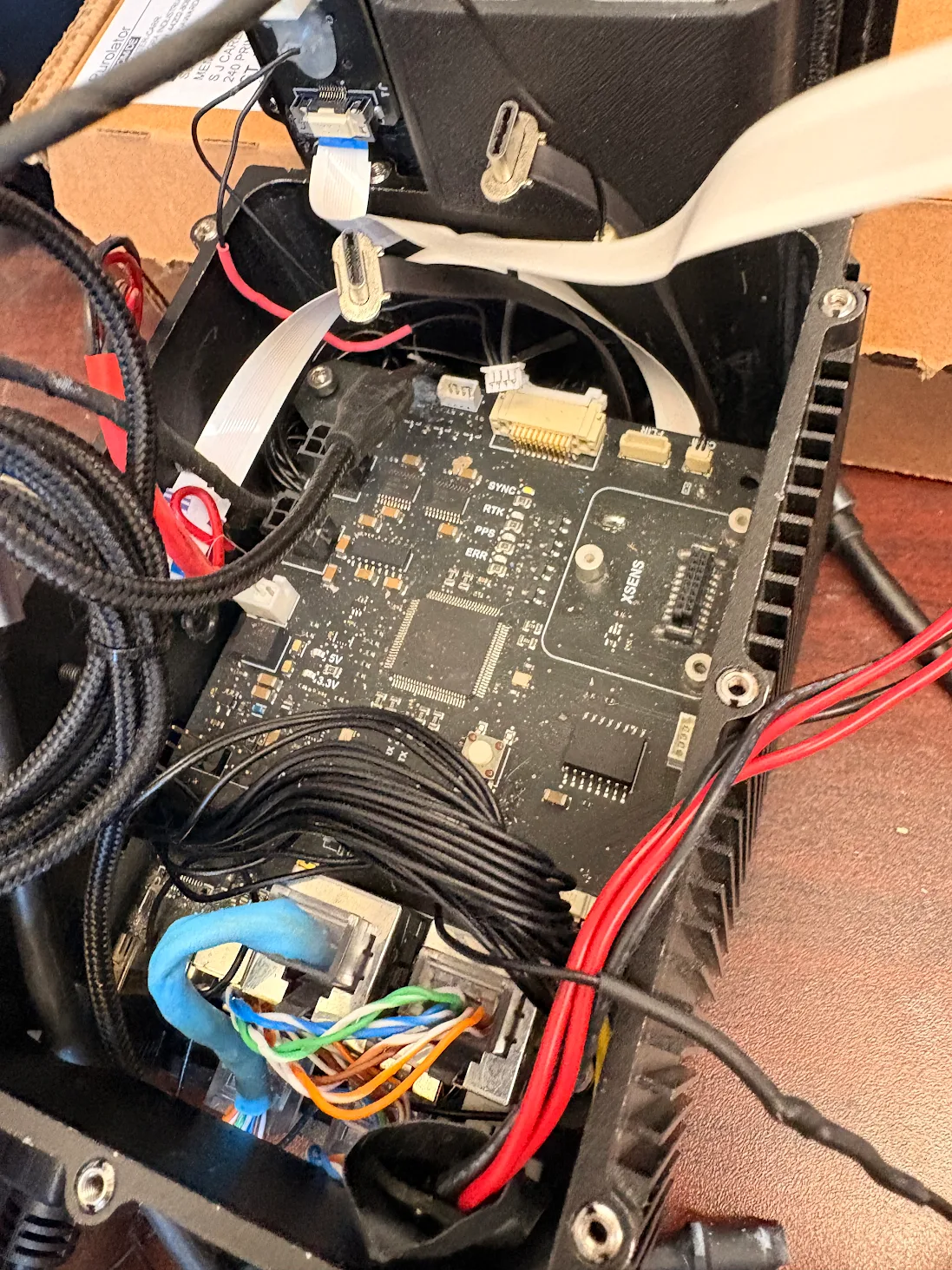
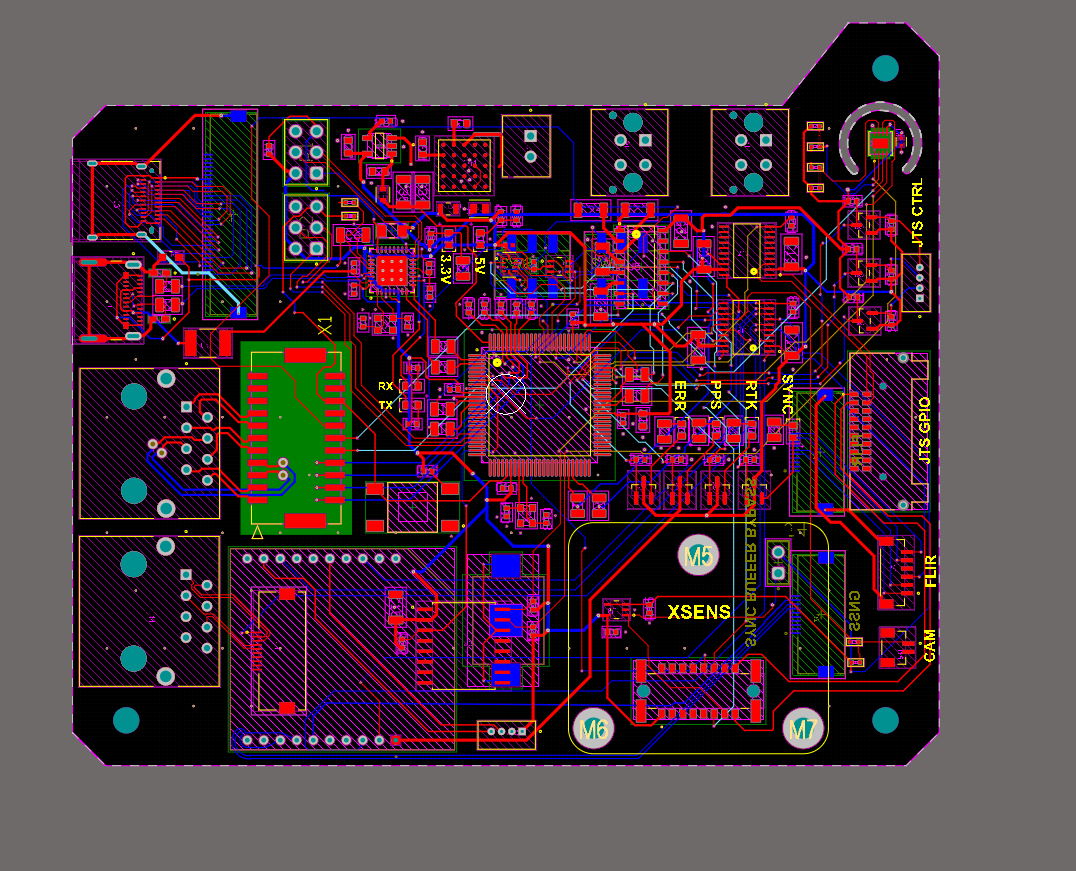
Electrical Work
- Corrected errors in the payload PCB design and adjusted power distribution traces.
- Re-routed and modified internal wiring harnesses to accommodate new sensors.
- Ensured safe and stable operation of multi-voltage systems under load.
Software & Integration
- Wrote C++ and ROS2 drivers to integrate LiDAR, thermal, and RGB cameras into the payload.
- Developed automated startup scripts to bring up all three cameras in the correct sequence.
- Verified data streams through real-time visualization tools (RViz, custom 3D visualizers).
What I Learned
This project was perfect for my interests - got to work on all three domains of mechatronics on a real system that actually matters. Learned a ton about sensor integration, ROS2 development, and the practical challenges of making multiple complex sensors work together reliably.
Seeing the whole system come together and visualizing the 3D point clouds and thermal data in real-time was incredibly satisfying.